


Nächste Seite: Grundlagen
Aufwärts: Zusammenfassung Robotik 1
Vorherige Seite: Erweiterung des Wegsuche-Problems
- Die menschliche Hand besitzt 16 Gelenke. Daraus resultieren 22 Freiheitsgrade. Modellierung durch kinematisches oder flächenbasiertes Modell (siehe Folie 4,5)
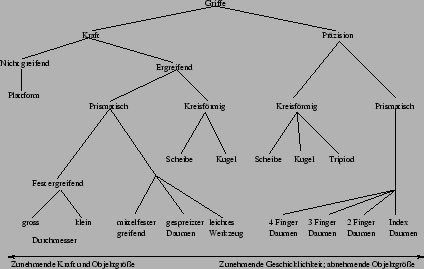
Abbildung 4.1:
Cutkosky Grifftaxonomie
 |
Unterabschnitte
Michael Aschke
2000-11-23