Transformation vom OKS des i-ten Armelementes in das OKS des (i-1)-ten Armelementes nach der Denavit-Hartenberg-Konvention.
Vorraussetzungen: Ursprung des Koordinatensystems ist fest mit Armteil i-1 verbunden und liegt im Schnittpunkt der gemeinsamen Normalen der Gelenkachsen i-1 und i mit der Gelenkachse i.
Prinzip: Effektorstellung wird schrittweise ermittelt; In jedes Robotergelenk wird ein Rechtskoordinatensystem gelegt; Die Systeme werden nach bestimmten DH-Regeln konstruiert, so daß die Transformationsmatrizen eine einheitliche Struktur erhalten.
Denavit-Hartenberg-Regeln:
Achse des Systems wird in Bewegungsachse des Gelenks gelegt. Richtung: positive Bewegungsrichtung von .
Achse wird durch Normale von nach definiert.
(Rechtssystem)
Spezialfälle:
Schneiden sich zwei Gelenkachsen
Ursprung im Schnittpunktder beiden Achsen. (Kann auch außerhalb des Arms liegen)
Gelenkachsen parallel
Usprung so wählen, dass Versatz zum Korrdinatenurpsrung im nächsten Gelenk des nächsten Armteils zu 0 wird.
Koordinatensystem bildet Basissystem und ist fest mit der Basis und dem Ursprung in der 1. Achse verbunden.
Koordinatensystem wird in den Greifer gelegt. muss normal zu liegen.
Überführen OKS(i-1) auf OKS(i):
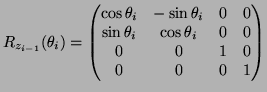
Rotation um die -Achse, damit -Achse parallel zur -Achse liegt:
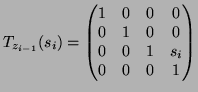
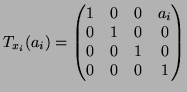
Translation entlang der -Achse zu dem Punkt, in dem sich und schneiden:
Translation entlang der -Achse, um die Ursprünge in Deckung zu bringen:
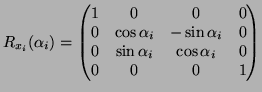
Rotation um die -Achse, um die -Achse und die -Achse in Übereinstimmung zu bringen:
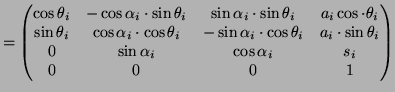
In Matrizenschreibweise:
Unterschied zwischen Translations- und Rotationsgelenk:
Translationsgröße:
; : konstanter Abstand vom Ursprung zum Schnittpunkt mit Normalen .; : Gelenkvariable.
Drehwinkel:
; : konstanter Winkel zur Überführung von nach bei
.; : Gelenkvariable.
und sind immer konstant
Armgleichung:
Direktes kinematisches Problem:
Armgleichung ausrechnen.
Gegeben
DkP (Gesucht)
Iverses kinematisches Problem:
Aus DH-Parametern und Stellung des Greifers sollen Gelenkwinkel bestimmt werden.
Mit bekannten Kinematikmodelldaten und gegebener Matrix unbekannte aus Armgleichung ermitteln.
Gegeben
IkP Gesucht
Lösung:
allgemeine Verfahren (algebraische Lösungen, Iteration, Reduktion der Ordnung der Armgleichung, Subsitutionsverfahren): Nachteile: Aufwand hoch und lange Zeitdauer
spezielle Verfahren (auf trigonoetrische/geometrische Beziehungen aufbauend (lokale Verfahren)): Vorteil: schnell; Nachteil: nur für spezielle Robotertypen